
Funktionale Diagnostik von VHF-Geräten. Fehler und deren Behebung
Maschinenübersetzung
Der Originalartikel ist in RU Sprache (Link zum Lesen) geschrieben.
Wir haben immer ein erhöhtes Interesse an der Arbeit mit individuellen Parametern der Artikulation des Unterkiefers gehabt. Wenn man darüber nachdenkt, was zeigen die Bewegungsbahnen des Unterkiefers? Sie sind das Ergebnis der Arbeit nicht nur der Kiefergelenke (Köpfe des Unterkiefers und Menisken), sondern auch des Muskelsystems, der Bänder und der Zahnreihen.
Über die Diagnose von internen Störungen der TMJ mit Hilfe von MRT im Webinar Diagnostische MRT-Algorithmen der TMJ.
Bei der Durchführung von kieferorthopädischer, orthopädischer und therapeutischer Behandlung ändert und schafft der Arzt neue Parameter für die Artikulation des Unterkiefers oder versucht, die alten zu bewahren. Wie funktionell die neuen Bedingungen für die Arbeit des oben beschriebenen anatomischen Komplexes sein werden, wird die Zeit zeigen. In diesem Artikel möchten wir über die Hauptphasen sprechen, die ein integraler Bestandteil der primären funktionellen Diagnostik der TMJ sind, und über die Ausrüstung, die für die Diagnose erforderlich ist.
Bedingt kann die Arbeit eines Arztes mit zusätzlicher Ausrüstung in Arbeit im realen und virtuellen Raum unterteilt werden. Ein einheitliches Kriterium für ein erfolgreiches Arbeitsergebnis in diesen beiden Formaten ist die korrekte Verwendung der Ausrüstung, das Verständnis ihrer technischen Möglichkeiten und die Genauigkeit ihrer Programmierung.

Phase I: Übertragung der Position der Ober-/Unterkiefer in den Artikulator unter Verwendung von durchschnittlich-anatomischen Gesichtsbögen, mögliche Probleme und deren Lösungen
Durchschnittlich-anatomische und anatomische Gesichtsbögen werden verwendet, um das Gipsmodell des Ober-/Unterkiefers in den Artikulator zu übertragen. Wie korrekt der Gesichtsbogen am Kopf des Patienten positioniert ist, beeinflusst die nachfolgende Diagnose und das Behandlungsergebnis. Es gibt zwei Arten von durchschnittlich-anatomischen Gesichtsbögen: die sich am Kopf des Patienten an Hautmarkierungen in Bezug auf die Camper'sche oder Frankfurter Ebene orientieren (Abbildung 1).
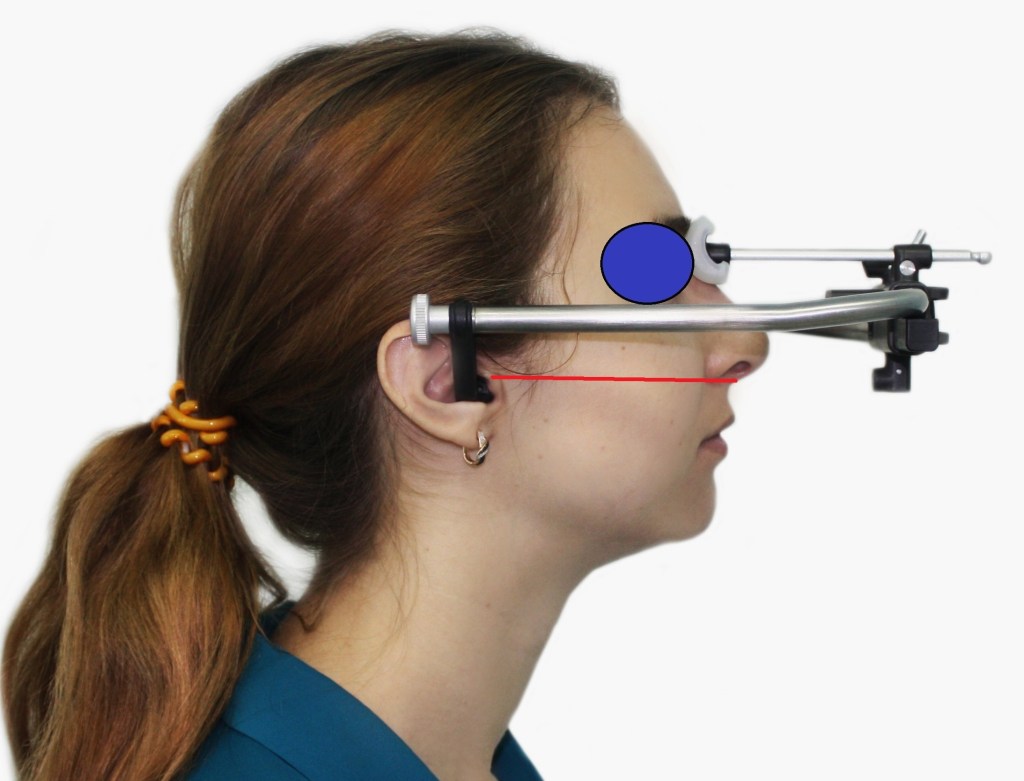
Abbildung 1. Positionierung der Gesichtsbogen Arcus (Kavo).
Nicht in allen klinischen Fällen stimmen die Hautmarkierungen mit den Knochenmarkierungen überein, was später zu Fehlern beim Gipsen des Modells führen kann. Das Arbeitsprinzip mit einem solchen Bogen erfordert die strikte Einhaltung der Parallelität zwischen dem am Kopf des Patienten angebrachten Gesichtsbogen und der Camper-Ebene, die durch Hautmarkierungen gebildet wird.
Was tun, wenn die Hautmarkierungen nicht mit den Knochenmarkierungen übereinstimmen?
Radiologische Untersuchung des Kopfes mit röntgenkontrastierenden Hautpunkten der oben beschriebenen Ebene für eine detailliertere Analyse durchführen. Klinisch wird diese Methode kompliziert, nicht in allen Kliniken kann eine solche radiologische Untersuchung durchgeführt werden. Wenn man diesen Parameter vernachlässigt, kann dies zu einer Änderung der Neigung des Modells in der Sagittalebene führen (Abbildung 2).

Abbildung 2. Drehung des Modells im Oberkiefer in sagittaler Projektion im oder gegen den Uhrzeigersinn.
Was tun, wenn die Camper'sche Ebene nicht parallel zur prothetischen Ebene ist?
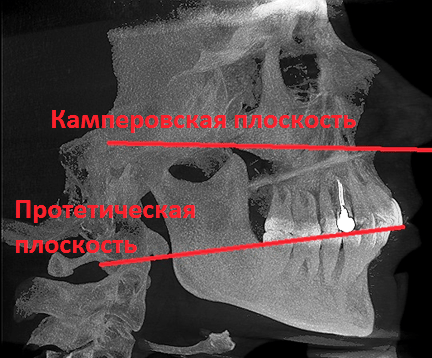
Abbildung 3. CT des Kopfes. Analyse der Orientierung der Ebenen.
Und warum sollten die Ebenen parallel sein (Abbildung 3)? Wenn im Artikulator das Modell im Oberkiefer in der Sagittalprojektion im Bereich der Schneidezähne angehoben ist, aber die Gesichtsbogen relativ zu den knöchernen Orientierungspunkten der Camper'schen Ebene korrekt ausgerichtet ist, stellt dies keinen Fehler dar.
Fehler, die bei der Verwendung von durchschnittlich anatomischen Gesichtsbögen auftreten können, umfassen die Neigung des Modells im Oberkiefer vorwärts oder rückwärts in der sagittalen Projektion, die Neigung des Modells im Oberkiefer nach rechts oder links in der Frontalebene und die Drehung des Modells in der horizontalen Ebene (Abbildung 4).
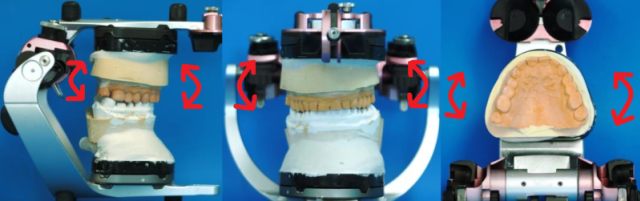
Abbildung 4. Mögliche Bewegungen des Modells im Artikulator.
Einer der schwerwiegendsten Fehler ist die Unfähigkeit, den Abstand vom Modell zu den Gelenkköpfen zu kontrollieren (Abbildung 5).

Abbildung 5. Einbetten des Modells im Artikulator unter Verwendung eines Gesichtsbogens. Fehlende Kontrolle über das Verhältnis von Modell und Gelenkmechanismen des Artikulators.
Dieser Fehler ist darauf zurückzuführen, dass es auf der Bissgabel mit Registrator keinen Anhaltspunkt für die Schneidezähne im Oberkiefer gibt, weshalb der Abstand vom Modell zu den Gelenken nicht fixiert ist. Es ist bekannt, dass für die normale Funktion von Gipsmodellen im Artikulator unter Berücksichtigung der durchschnittlichen Parameter die Daten des Bonwill-Dreiecks berücksichtigt werden müssen (Abstand von den Schneidezähnen im Unterkiefer zu den Gelenkmechanismen des Artikulators). Da jedoch die Verwendung eines Gesichtsbogens den Transfer des Oberkiefermodells impliziert, muss in erster Linie der individuelle Abstand von den Schneidezähnen im Oberkiefer zu den Gelenkmechanismen eingehalten werden.
Daher gibt es bei der Verwendung von durchschnittlich-anatomischen Gesichtsbögen Ungenauigkeiten, die möglicherweise korrigiert werden können oder nicht. Dies ist auf Mängel in der Konstruktion der Bögen selbst zurückzuführen.
Lösung von Problemen, die bei der Verwendung von durchschnittlich-anatomischen Gesichtsbögen auftreten
Zur Lösung von Problemen, die bei der Verwendung von durchschnittlich-anatomischen Gesichtsbögen auftreten, haben wir eine Methode zur Übertragung des Oberkiefermodells in den Artikulator und zusätzliche Ausrüstung entwickelt – einen zentralen Marker und eine Halterung (Abbildung 6).
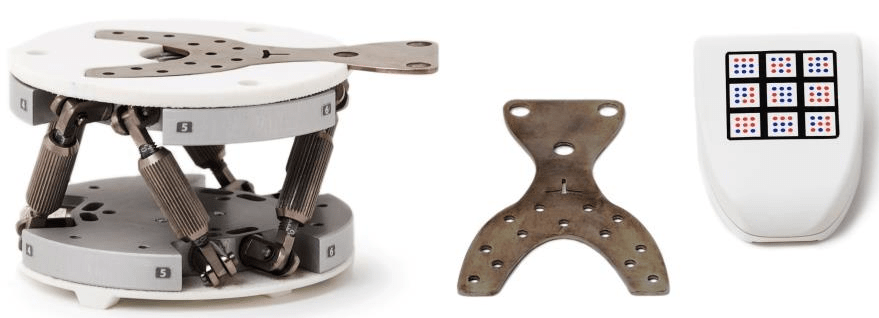
Abbildung 6. Gestell für Gipsarbeiten und zentraler Marker (Prosystom).
Der zentrale Marker besteht aus einer Gabel und einem Controller. Zur Kontrolle der Modellposition auf dem Marker gibt es eine Markierung für die Meißel. Bei der Verwendung des zentralen Markers haben wir auf jegliche Hautmarkierungen verzichtet, um Fehler zu minimieren (Abbildung 7).

Abbildung 7. Positionierung des Zentralmarkers bei der Registrierung der Position der prothetischen Ebene.
Nach der Bestimmung der individuellen Position der prothetischen Ebene gibt der Controller Daten zur Einstellung des Ständers nach individuellen Parametern aus (Abbildung 8).
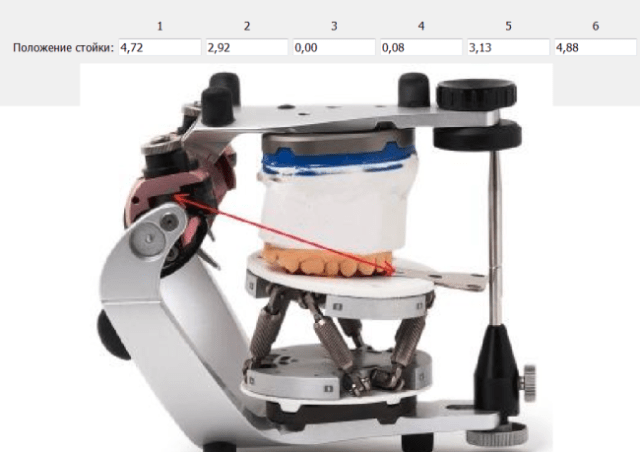
Abbildung 8. Gipsmodellierung einer Ober-/Unterkiefermodell mit Verwendung eines Ständers im Artikulator Protar.
Um alle individuellen Parameter bei der Gipsmodellierung zu berücksichtigen, verwenden wir ein zusätzliches CT-Modul (Abbildung 9).
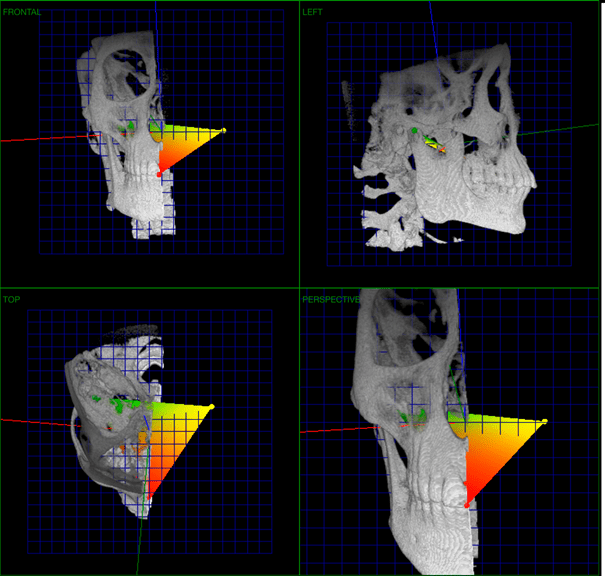
Bild 9. CT-Modul für Gipsmodelle (Prosystom).
Dieses Modul ermöglicht es, den individuellen Abstand von den Schneidezähnen des Oberkiefers zu den Gelenkköpfen zu messen, um ihn anschließend in den Artikulator zu übertragen. In dieser Methode werden 3 Orientierungspunkte verwendet: der interinzisale Punkt im Bereich der Schneidekante der zentralen Oberkieferzähne und Punkte im Bereich der Gelenkköpfe. Hinweis: Es ist nicht gerechtfertigt, den Orientierungspunkt der Gelenkachse ausschließlich mit CT zu setzen, da dies durch erhebliche Unterschiede im Aufbau der Gelenkköpfe des Menschen und des Artikulators bedingt ist (Bild 10).
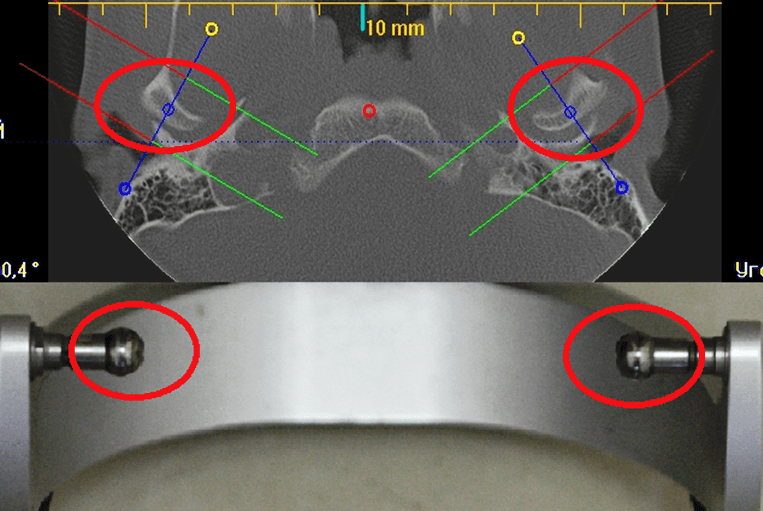
Bild 10. Vergleichende Analyse der Anatomie der menschlichen Gelenkköpfe und der Gelenkköpfe des unteren Rahmens des Artikulators.
Daher setzen wir den Punkt im Bereich der Gelenke an der Spitze der Gelenke. Das Festlegen eines Punktes auf den Gelenkmechanismen des Artikulators bereitet ebenfalls keine Schwierigkeiten. Nachdem die Modelle korrekt im Artikulator eingegipst wurden unter Berücksichtigung individueller Parameter, kann man zur Einstellung desselben übergehen.
II Phase: Programmierung des Artikulators nach individuellen Parametern, Einsatz elektronischer Artikulationsaufzeichnungssysteme, Fehler, die bei der Verwendung elektronischer AxioGraphen auftreten
Der zweite Teil des Artikels widmet sich der Programmierung von Artikulatoren: Wir werden einige ungelöste Probleme beim Einsatz elektronischer AxioGraphen aufdecken, da diese Systeme die genauesten sind. Es bleibt die Frage offen, die sich auf die Kosten der elektronischen AxioGraphen bezieht. Diese Ausrüstung ist sekundär bei der Arbeit und wird nur benötigt, um die Bewegungsbahnen und ihre digitalen Werte aufzuzeichnen. Elektronische Registrierungssysteme sind schon lange auf dem Markt, aber sie sind immer noch nicht besonders gefragt. Warum? Hohe Preise, Mangel an verfügbarer Information für Ärzte, Ungenauigkeiten bei ihrer Verwendung in komplexen klinischen Fällen, einige Geräte haben eine ziemlich komplexe Struktur.
Elektronische Aufzeichnungssysteme sind bei korrekter Anwendung die einzige Ausrüstung, die es ermöglicht:
- beliebige Bewegungsbahnen zu registrieren;
- individuelle Daten für die Programmierung von Artikulatoren zu erhalten;
- eine dreidimensionale Darstellung der Artikulation zu erhalten;
- in einem virtuellen Raum mit individuellen Parametern zu arbeiten;
- Daten für die Analyse der dynamischen Okklusion unter Verwendung virtueller Modelle zu erhalten;
- die Verwendung dieser Geräte ermöglicht eine dynamische Beobachtung der Patienten bei langfristiger Behandlung.
Mechanische, elektronische und virtuelle Artikulatoren sind in dieser Liste die Hauptausrüstung, da mit ihrer Anwendung Konstruktionen hergestellt werden. AxioGraphen sind jedoch eine Hilfsausrüstung, die für die Einstellung der Artikulatoren notwendig ist.
Die am weitesten verbreiteten elektronischen Systeme sind Ultraschallsysteme. Diese Systeme haben Schwachstellen.
Konstruktion einer paraokklusalen Gabel zur Fixierung des Ultraschallsensors (Abbildung 11).
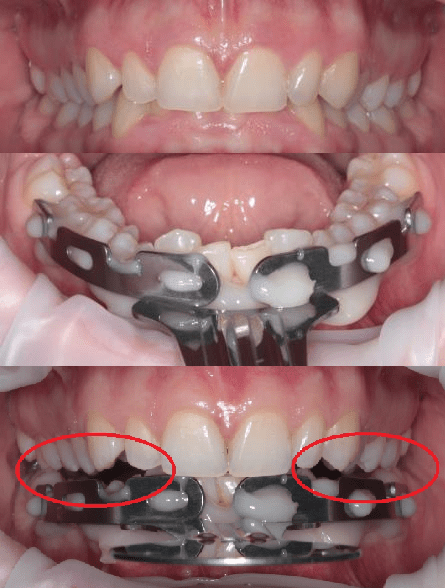
Abbildung 11. Positionierung der paraokklusalen Gabel auf der Zahnreihe u./o.
Ein tiefes Schneidezahnüberbiss dient als relatives Kontraindikation für die Durchführung einer präzisen Artikulationsregistrierung u./o. Auch bei einer niedrigen klinischen Höhe des Kronenteils der Zähne u./o., bei pathologischer Abnutzbarkeit der Frontzahngruppe u./o., kann die Gabel das gewohnte Schließen der Zahnreihen behindern. Wir betrachten dies als einen ernsthaften Nachteil, insbesondere bei der Diagnose von Patienten mit Dysfunktionen des Kiefergelenks, da dies zu einer Trennung der Zahnreihen führt: Der Kontakt bleibt hauptsächlich zwischen den Schneidezähnen o./u. und der paraokklusalen Gabel, was wiederum zu einer unkontrollierten Verschiebung der u./o. führen kann.
In solch einem Fall ist es möglich, die Bewegungstrajektorien der u./o. zu registrieren, aber es wird praktisch unmöglich sein zu bestimmen, wo sich die Gelenke zu Beginn der Trajektorien befanden (Abbildung 12). Die artikulatorische Analyse zur Gewinnung digitaler Daten für die Programmierung des Artikulators nach individuellen Parametern wäre sinnlos, da die klassischen Trajektorien mit Beteiligung der Zahnreihen verändert würden.
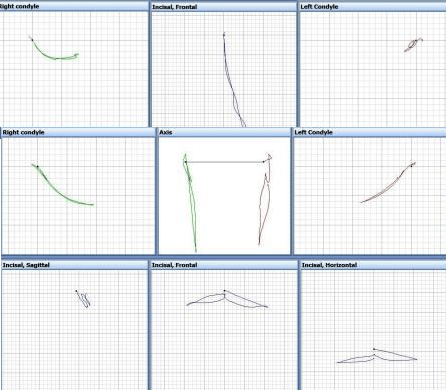
Bild 12. Bewegungsbahnen der Unterkiefer: Öffnen-Schließen und Laterotrusion.
Erhaltung verschiedener Bahnen bei einem Patienten bei mehreren Untersuchungen mit zeitlichem Abstand.
Zuerst wird der AxioGraph am Kopf des Patienten befestigt, die Bahn wird aufgezeichnet (zum Beispiel Öffnen und Schließen des Mundes), und dann werden die Bahnen auf dem Bildschirm angezeigt (Bild 13).
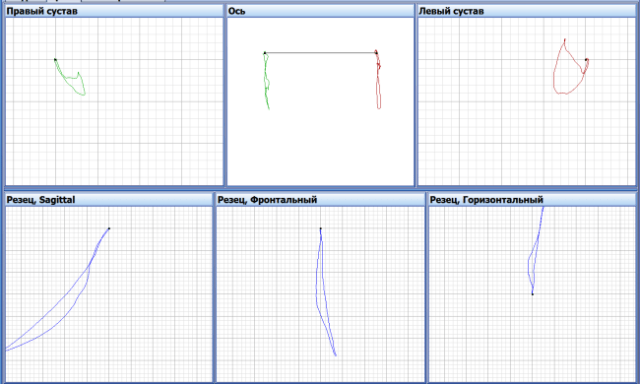
Bild 13. Bahnen des Öffnens und Schließens des Mundes.
In der Folge wird der AxioGraph vollständig vom Kopf des Patienten entfernt und dieselbe Untersuchung wird nach 15 Minuten durchgeführt. Bei der nächsten Untersuchung wurden jedoch andere Trajektorien erhalten (Abbildung 14).
Welche Daten aus diesen Studien sind korrekt?
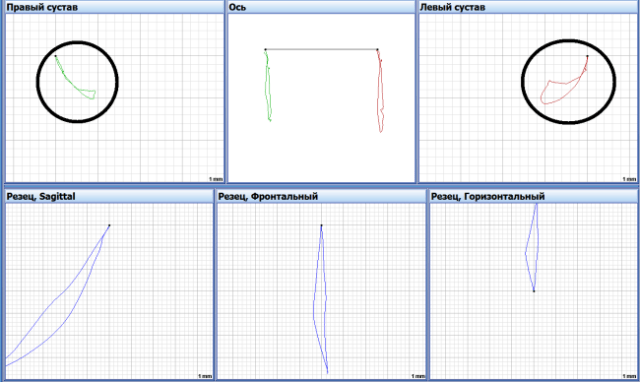
Abbildung 14. Trajektorien, die nach 15 Min. aufgezeichnet wurden. Öffnen und Schließen des Mundes.
Es wurde auch eine Registrierung der Unterkieferbewegungen unter Berücksichtigung der Zahnführungen durchgeführt, um digitale Winkelwerte zu erhalten, und es wurden unterschiedliche Daten erhalten (Abbildung 15).
Nach welchen Daten sollte der Artikulator programmiert werden?
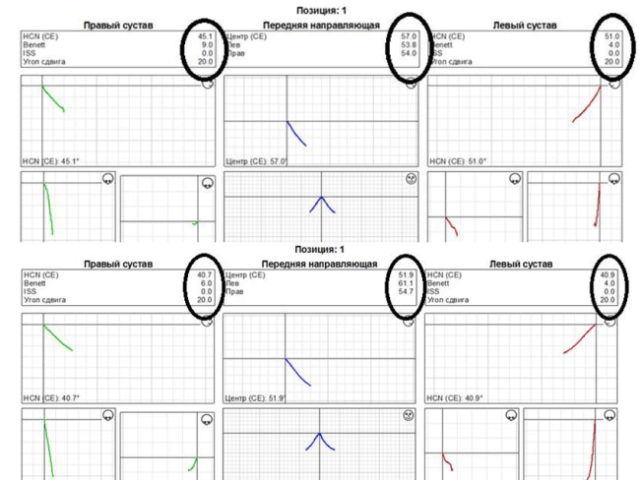
Abbildung 15. Verschiedene Daten für die Programmierung des Artikulators.
Fehlerdaten treten in erster Linie aufgrund von Unterschieden in der Befestigung des Ultraschall-Axiographen am Kopf des Patienten bei den oben beschriebenen Messungen auf. Um diese Probleme teilweise zu lösen, ist es notwendig, das mit einer Gabel vom Zahnreihen erhaltene Register zu speichern und die Position der paraokklusalen Gabel bei Untersuchungen mit zeitlichen Abständen nicht zu ändern.
Lösung von Problemen, die bei der elektronischen Axiographie auftreten
Das Hauptergebnis unserer Forschung war die Schaffung eines genaueren und zugänglicheren Geräts zur Registrierung der Bewegungen des Unterkiefers und die Korrektur der Methodik der elektronischen Axiographie selbst (Abb. 16). Wir haben das Gerät Dentograf (Prosystom) entwickelt.
Bild 16. Optisches Gerät zur Registrierung der Artikulation n/ch Dentograf (Prosystom).
Heute ist der Dentogaf das kompakteste und einfachste Gerät zur Aufzeichnung von Trajektorien. Es handelt sich um ein optisches Gerät, das nur eine Kamera verwendet.
Angesichts der oben beschriebenen Probleme, die mit der Befestigung des Sensors am n/ch auftreten, haben wir spezielle Marker entwickelt, die es ermöglichen, Untersuchungen bei nahezu jeder Pathologie der Zahnreihen durchzuführen. Jetzt ist eine tiefe Schneidezahnüberlappung kein Hindernis mehr für Studien (Bild 17).
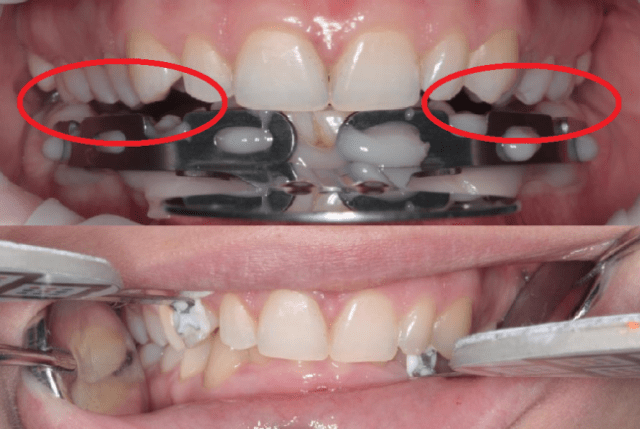
Bild 17. Anordnung der paraokklusalen Gabel und der seitlichen Marker des Geräts Dentograf.
Ein zentraler Sensor, der dazu dient, die individuelle Position der prothetischen Ebene zu bestimmen, zwei seitliche (Abbildung 18). Ein seitlicher Marker wird am Zahn im Oberkiefer befestigt, der andere am Zahn im Unterkiefer. In dieser Methode haben wir vollständig auf die Verwendung von durchschnittlich-anatomischen Gesichtsbögen verzichtet und damit die Diagnosegenauigkeit erheblich erhöht.

Abbildung 18. Sensor-Set des Geräts Dentograf.
Es wurde möglich, ohne jegliche Probleme Untersuchungen bei Patienten durchzuführen, die eine kieferorthopädische Behandlung mit der Verwendung von Bracket-Systemen erhalten (Abbildung 19).

Abbildung 19. Anordnung der Seitensensoren bei Patienten mit einer Zahnspange.
Alle oben beschriebenen Techniken und Geräte der Firma Prosystom ermöglichen präzise Diagnostik und die Planung der Behandlung im realen Raum.
III Phase: Verwendung des virtuellen Artikulators bei der primären funktionellen Diagnostik (Arbeit mit virtuellen Modellen)
Die nächste wichtige Aufgabe, die wir zu lösen versucht haben, ist die Nutzung unserer Möglichkeiten im virtuellen Raum, nämlich die Arbeit mit virtuellen Modellen.
Was ist neu mit der Einführung von virtuellen Artikulatoren?
Ein mechanischer Artikulator ermöglicht die Reproduktion von 3 Trajektorien: Protrusion, Laterotrusion nach rechts und links.
Ein virtueller Artikulator ermöglicht die Reproduktion von 3 Trajektorien: Protrusion, Laterotrusion nach rechts und links.
Virtuelle Artikulatoren sind eine vollständige Nachbildung der mechanischen, nur hat sich der Raum verändert – von real zu virtuell.
Wie notwendig sind die vorhandenen virtuellen Artikulatoren, wenn ihre funktionellen Möglichkeiten begrenzt sind?
Zum Beispiel, warum ist es im virtuellen Raum nicht möglich, beliebige Trajektorien zu reproduzieren und was verhindert das?
Dies wird durch die derzeit in der Software vorhandenen virtuellen Artikulatoren behindert, genauer gesagt durch deren Aufbau (Abbildung 20).
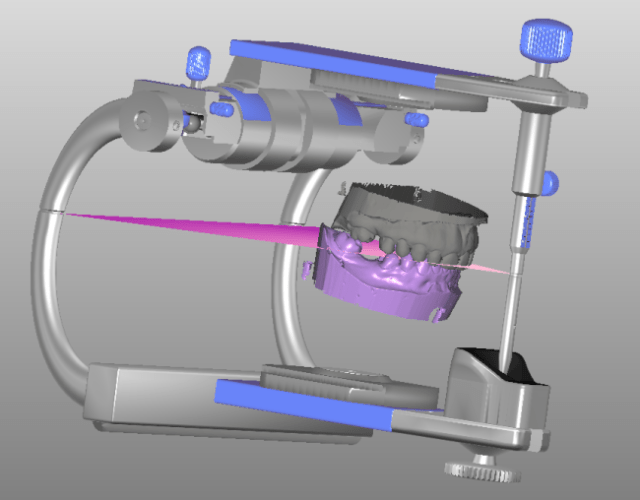
Abbildung 20. Virtueller Artikulator.
Lösung der Probleme, die bei der Verwendung von virtuellen Artikulatoren auftreten.
Für die Arbeit im virtuellen Raum unter Berücksichtigung der individuellen Parameter des Patienten sind erforderlich: Computertomographie, virtuelle Modelle, Bewegungstrajektorien und die korrekte Ausrichtung des virtuellen Modells in/aus und an/aus.
Wenn man versucht, den Artikulator bei der Arbeit im virtuellen Raum wegzulassen, ergeben sich neue vielversprechende Möglichkeiten:
- Individuelles Verhältnis von virtuellen Modellen und Gelenken n/ч. Dafür muss man das CT des Kopfes des Patienten und virtuelle Modelle verwenden. Das Verbinden von CT und Modellen stellt heute keine großen Schwierigkeiten dar (Abbildung 21).
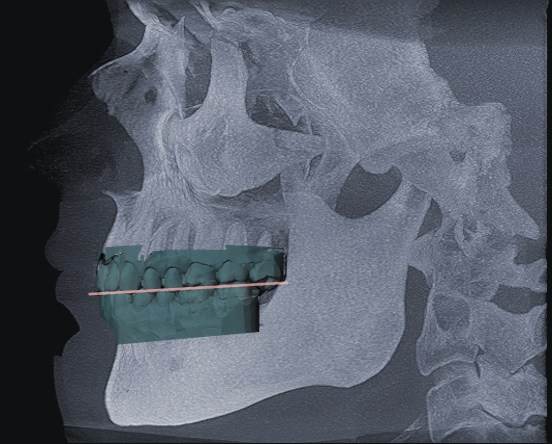
Abbildung 21. Kombination von CT und virtuellen Modellen.
- Reproduktion beliebiger Artikulationstrajectorien n/ч mit Verwendung von virtuellen Modellen (Abbildung 22). Dafür verwenden wir das Gerät Dentograf.
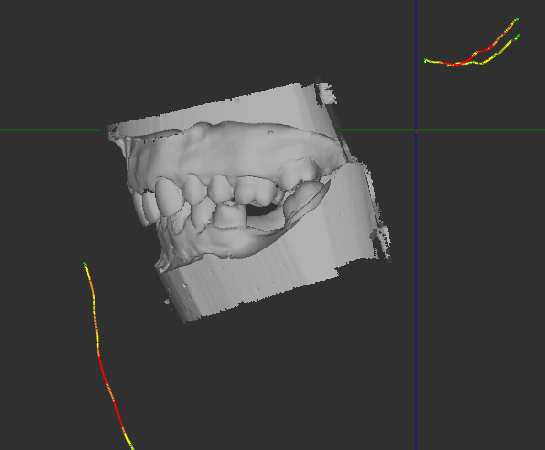
Bild 22. Bewegungsbahnen der n/ch und virtuelle Modelle.
- Ausrichtung der Modelle im virtuellen Raum. Die Verwendung eines zentralen Markers ermöglicht es, das Modell der n/ch im virtuellen Raum genauso zu platzieren, wie beim Patienten (Bild 23).

Bild 23. Verwendung des Zentralmarkers zur Positionierung der Modelle im virtuellen Raum.
Durchführung der funktionellen Diagnostik von VNCHS (Schlussfolgerung)
Wir haben eine umfassende Methode und neue Ausrüstung für die erste funktionelle Diagnostik von VNCHS entwickelt. Diese Ausrüstung ist universell für den Einsatz in realen und virtuellen Räumen mit minimalen Fehlern einsetzbar.
Weitere Informationen zur Diagnostik von VNCHS-Schäden im Webinar Röntgenuntersuchung von VNCHS. Fortgeschrittenes Niveau.
http://stomanet.ru/